Visual Inertia Navigation
 Photo by rawpixel on Unsplash
Photo by rawpixel on Unsplash
Abstract
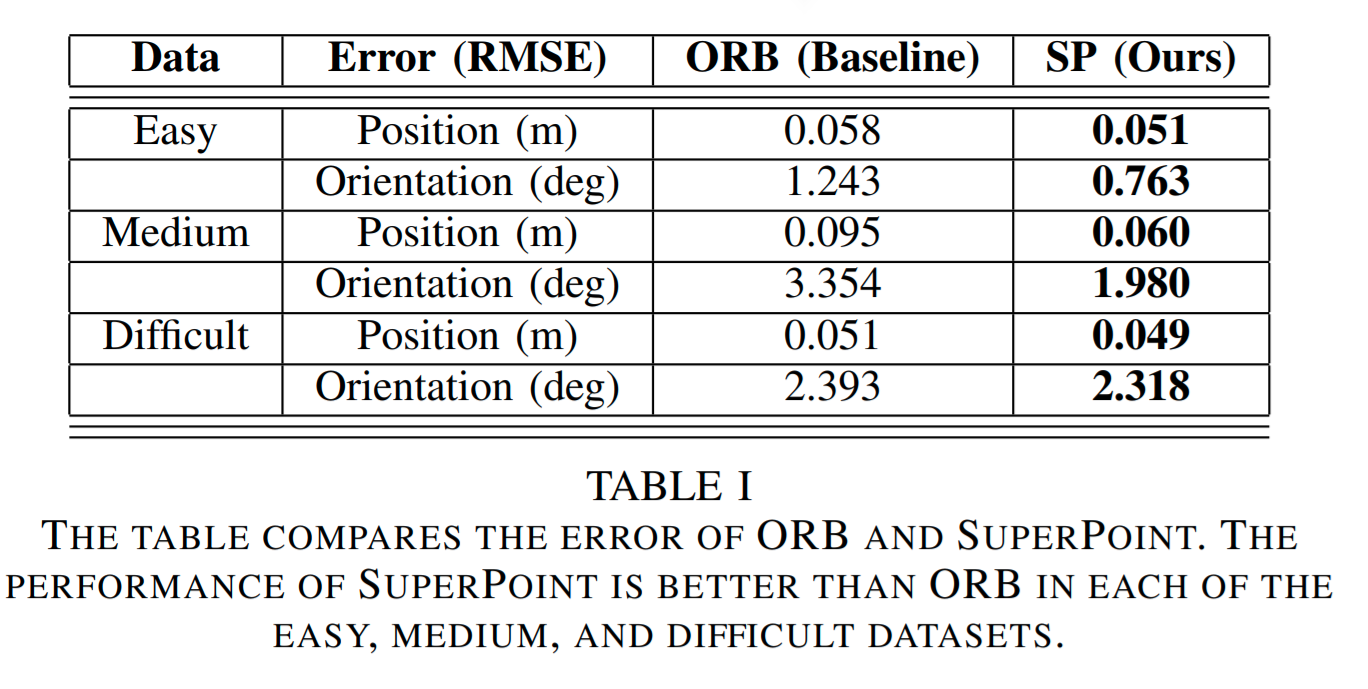
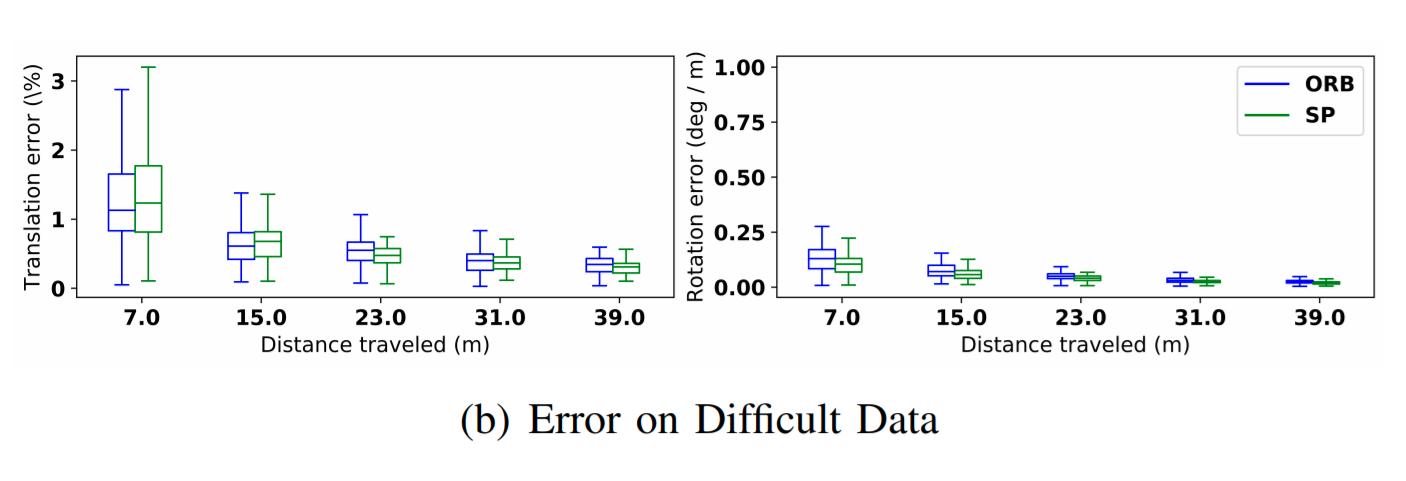
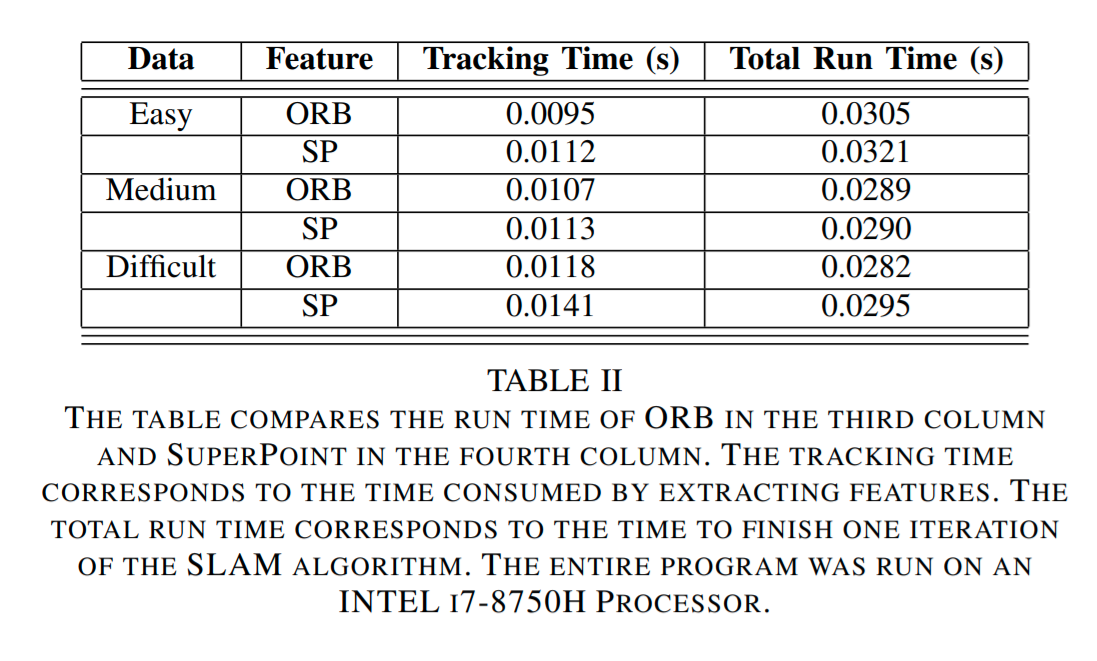
This project aims to adopt an open-source visual inertial navigation framework with two modifications. First, an alternative visual descriptor and extractor, SuperPoint, is tested in place of ORB features. Secondly, an invariant error state is implemented in order to more effectively track the IMU pose uncertainty while maintaining the visual feature correction step in a ”dual track” system. Each of these changes is evaluated separately on three datasets obtained from the EuRoC MAV dataset. Our code repository is located here.
Performance
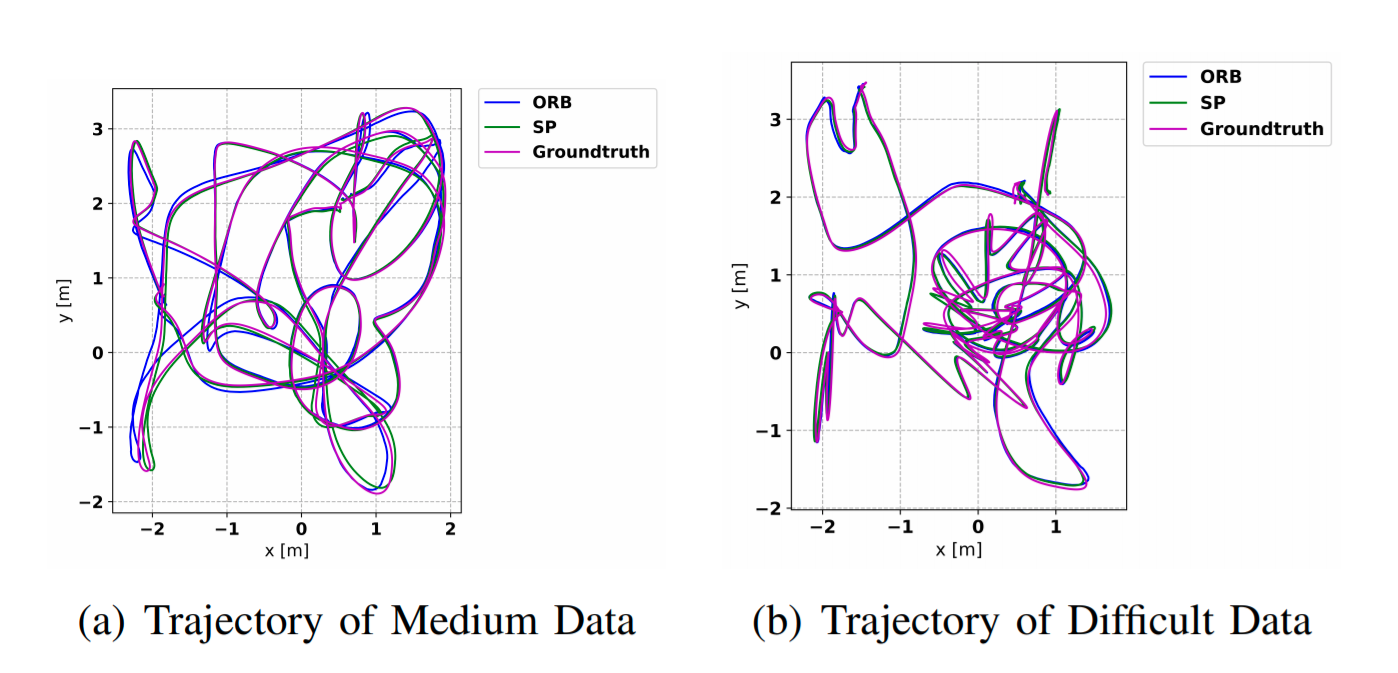
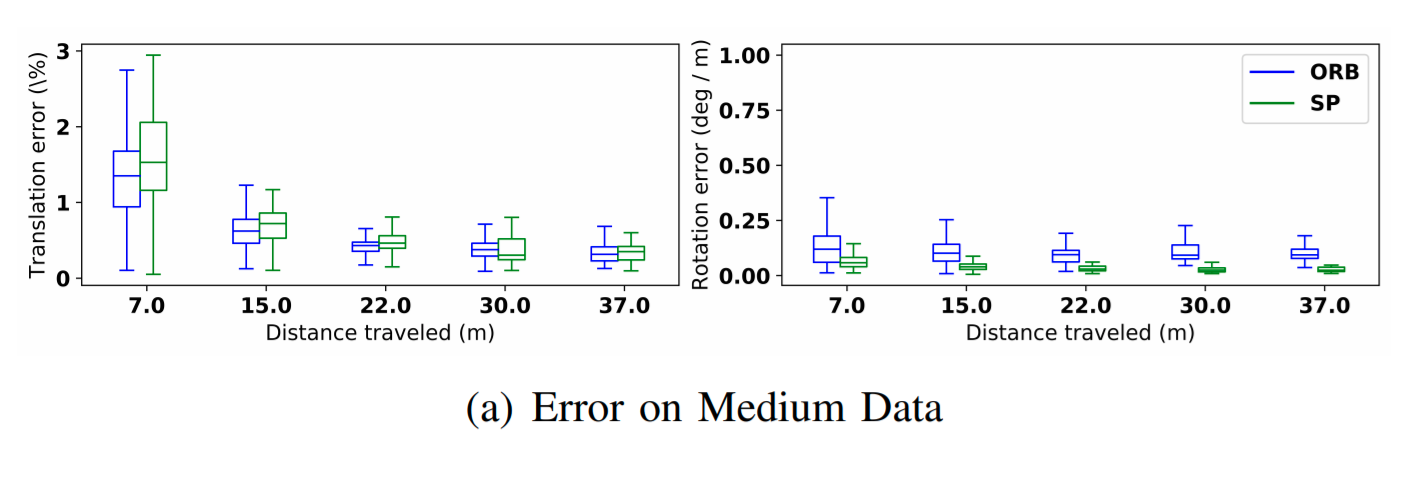
Evaluate the performance on the EuRoC MAV dataset
Video
JING-AN TZENG
Video Processing Algorithm Engineer
My interests include Robotics, Computer Vision and Control System.